
From left to right:
Brendan worked with all systems. He designed the claws, drivetrain, and power distribution systems. He also wrote robot movement functions.
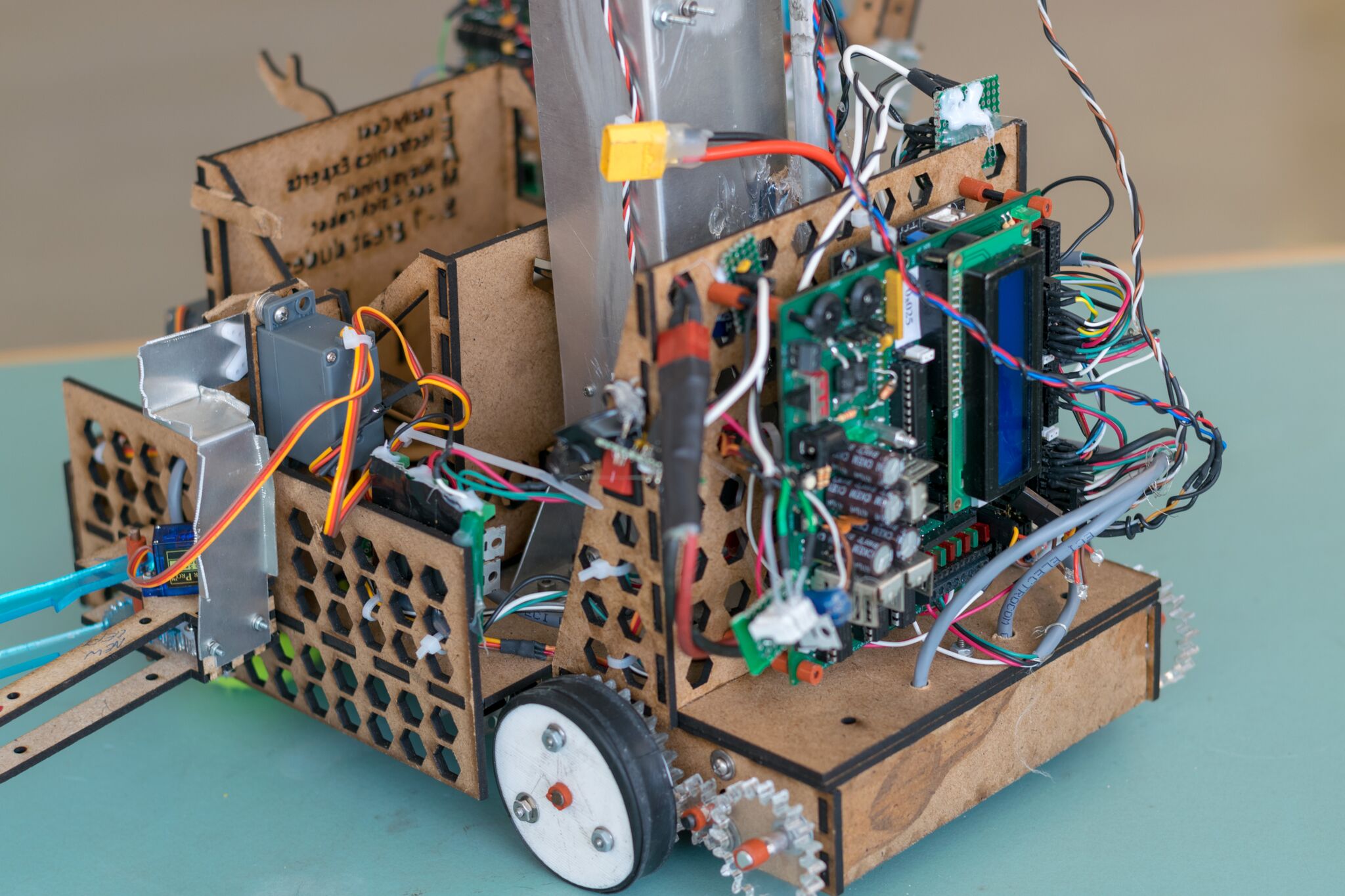
Miles built much of the circuitry and was in charge of wiring. He also helped with the software and testing leading up to competition.
Matan was the mech lead. He kept the CAD working and organised. He designed and built the lift mechanism, as well as the basket.
Joel designed the layout of the code, as well as writing many of the functions. He also designed and built the hook mechanism.
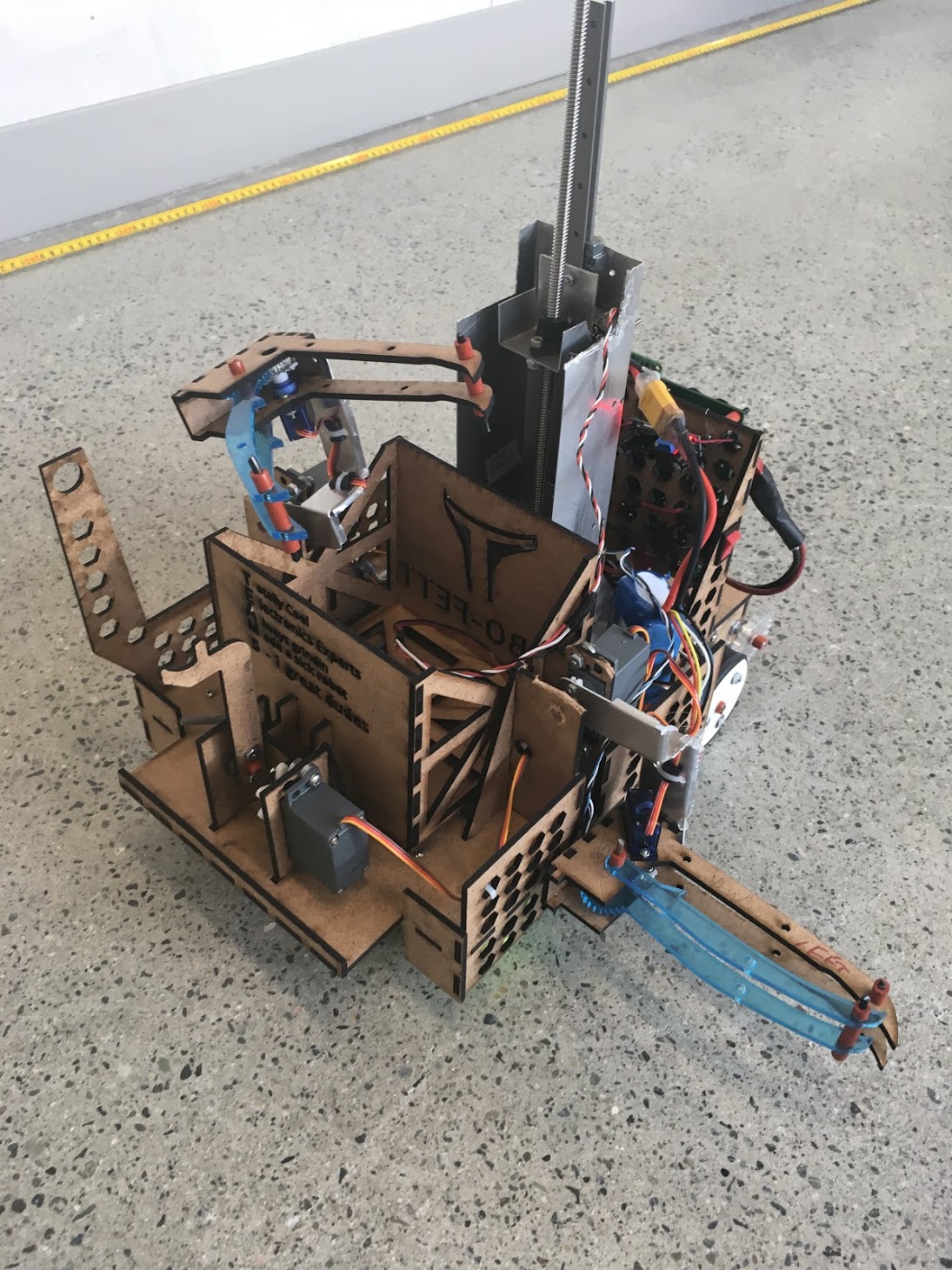
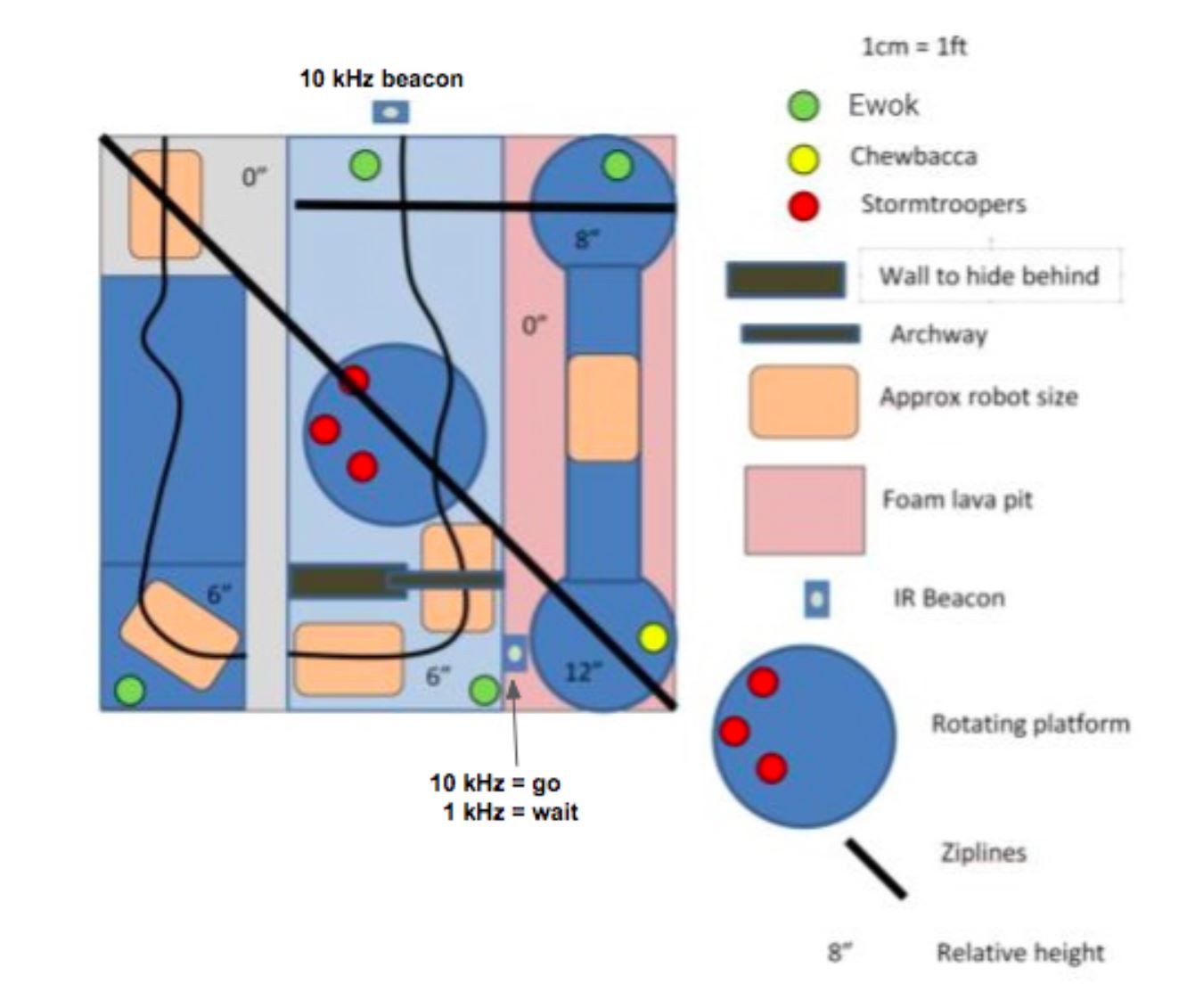
Chewbacca is in trouble! He has been captured by the Stormtroopers and is being held in an Empire Stronghold, where he -- along with four Ewoks -- awaits rescue. Their only hope of survival is the brave droid Robo-Fett! To rescue the Ewoks and Chewie, Robo-Fett will climb a ramp and cross a gap to the gate of the Stronghold. He will then wait for R2-D2's signal (an Infra-Red beacon) to decide it is safe to enter. If he enters at the wrong time, the Stormtroopers will see him and a platform will start rotating!
Picking up Ewoks along the way, Robo-Fett will proceed to the farthest edge of the Stronghold, tossing three of the Ewoks to safety before making the daring climb up the zipline. He will then cross the bridge, rescue Chewie, and zipline to safety!
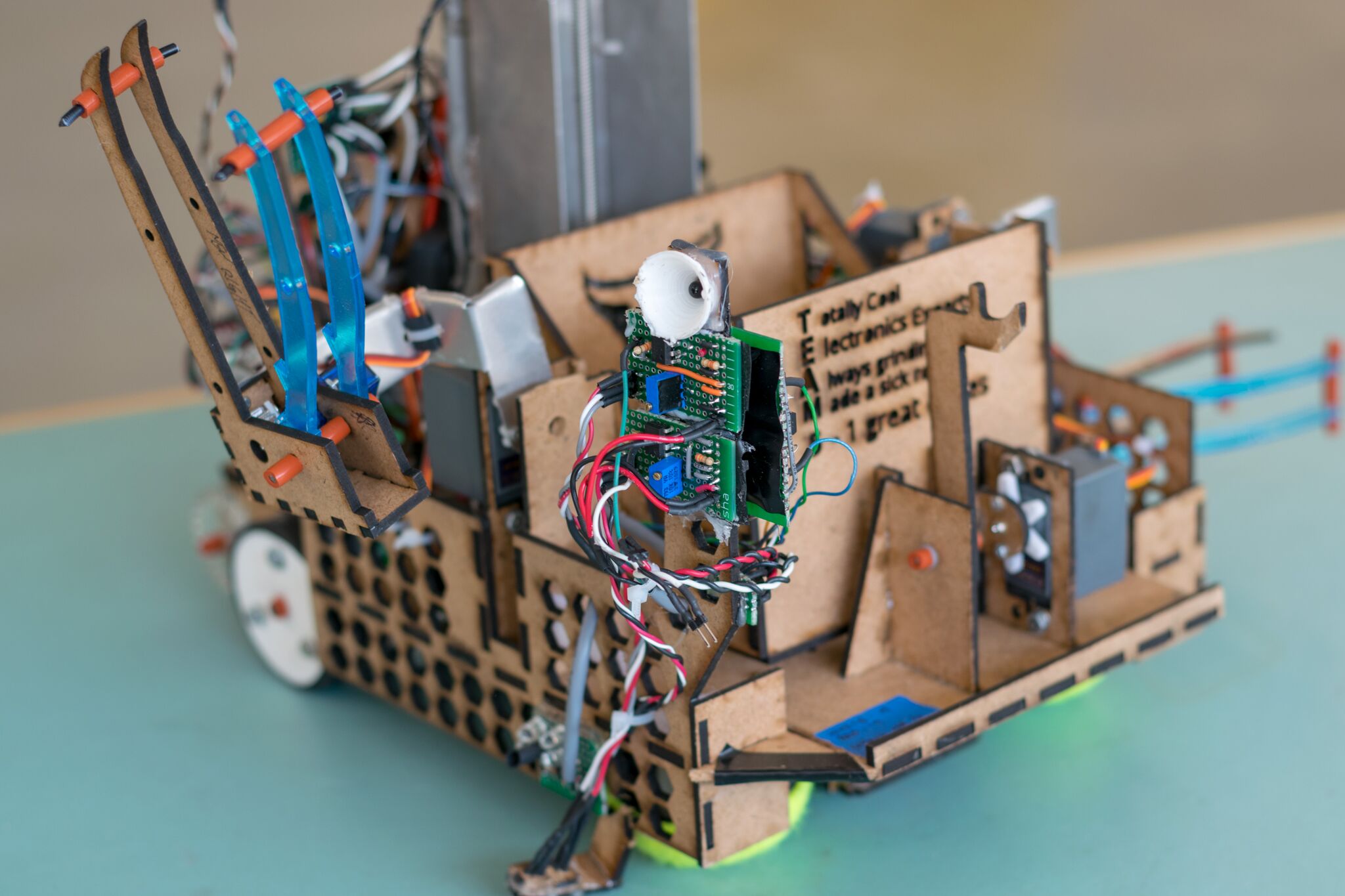
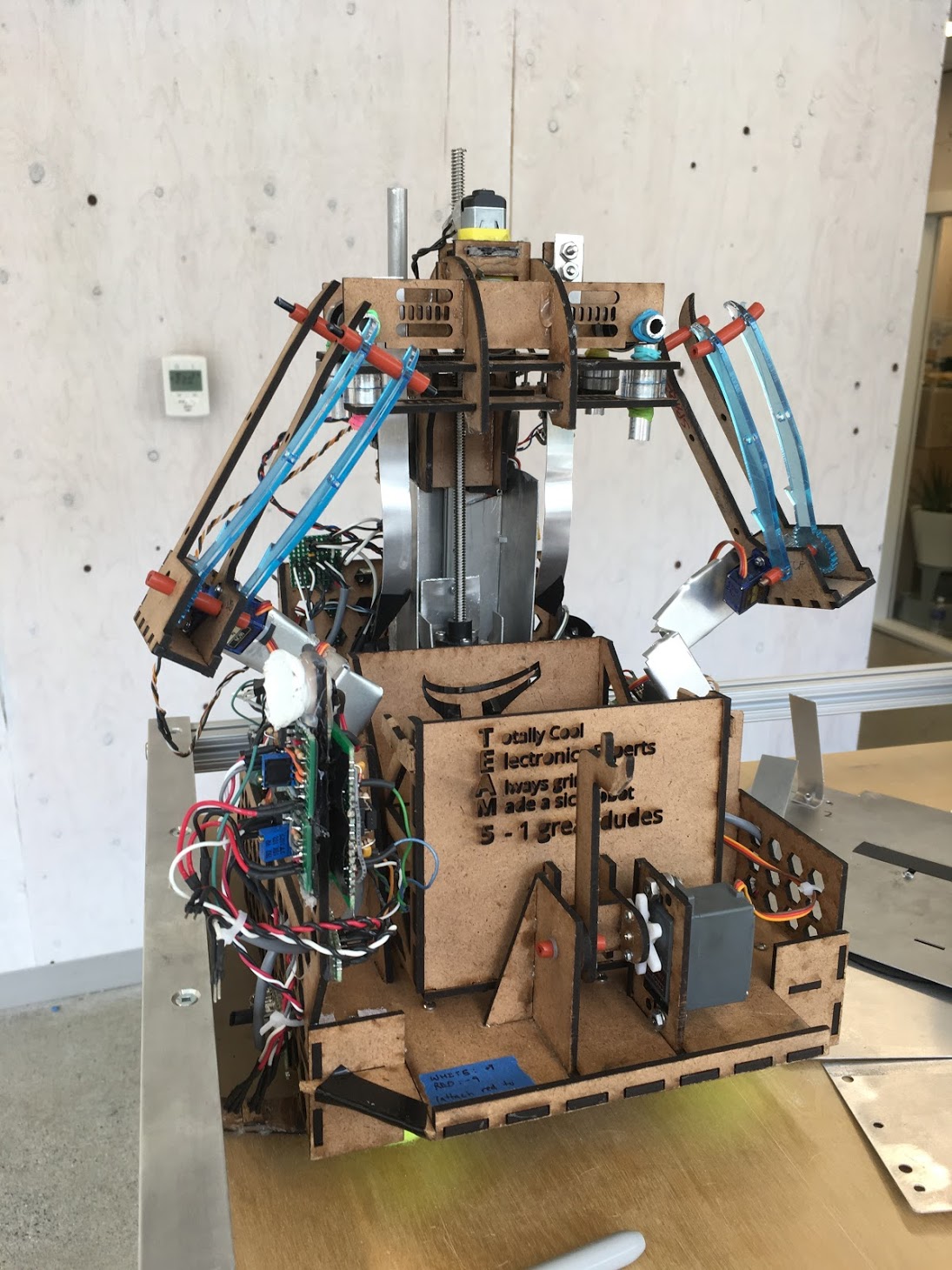
Robo-Fett has two claws, one on each side, to facilitate Ewok retrieval. They are designed to stay open at 90 degrees until an Ewok is detected, at which point they snap shut and lift the Ewok into the basket.
Robo-Fett detects Ewoks using an IR emitter/detector. Infra-Red light is emitted in pulses from an IR-LED. The light bounces off an Ewok, and is detected by a phototransistor under the claw. Based on how much IR is detected, Robo-Fett can tell if there is an Ewok within reach!
After picking up an Ewok, Robo-Fett stores it in a basket. This basket is attached to a servo, which allows it to rotate 180 degrees to toss the Ewoks to safety halfway through the course. Depositing three Ewoks in this way is less risky, because if we fail later on, we have guaranteed the rescue of at least three Ewoks.
Robo-Fett crosses the first 6-inch gap using a bridge, which is deployed by tilting the basket forward. The bridge has prongs sticking off it to help it land consistently in the gap.
Robo-Fett uses two main forms of navigation: tape following, and encoders. To tape follow, there are four IR emitter/detector pairs at the front of the chassis. These sensors output a different voltage depending on the reflectance of the surface below, so they have little trouble distinguishing if they are looking at black tape or a white surface. For the sections where there is no tape, we have encoders that turn with the wheels, and let us know how far we have driven.
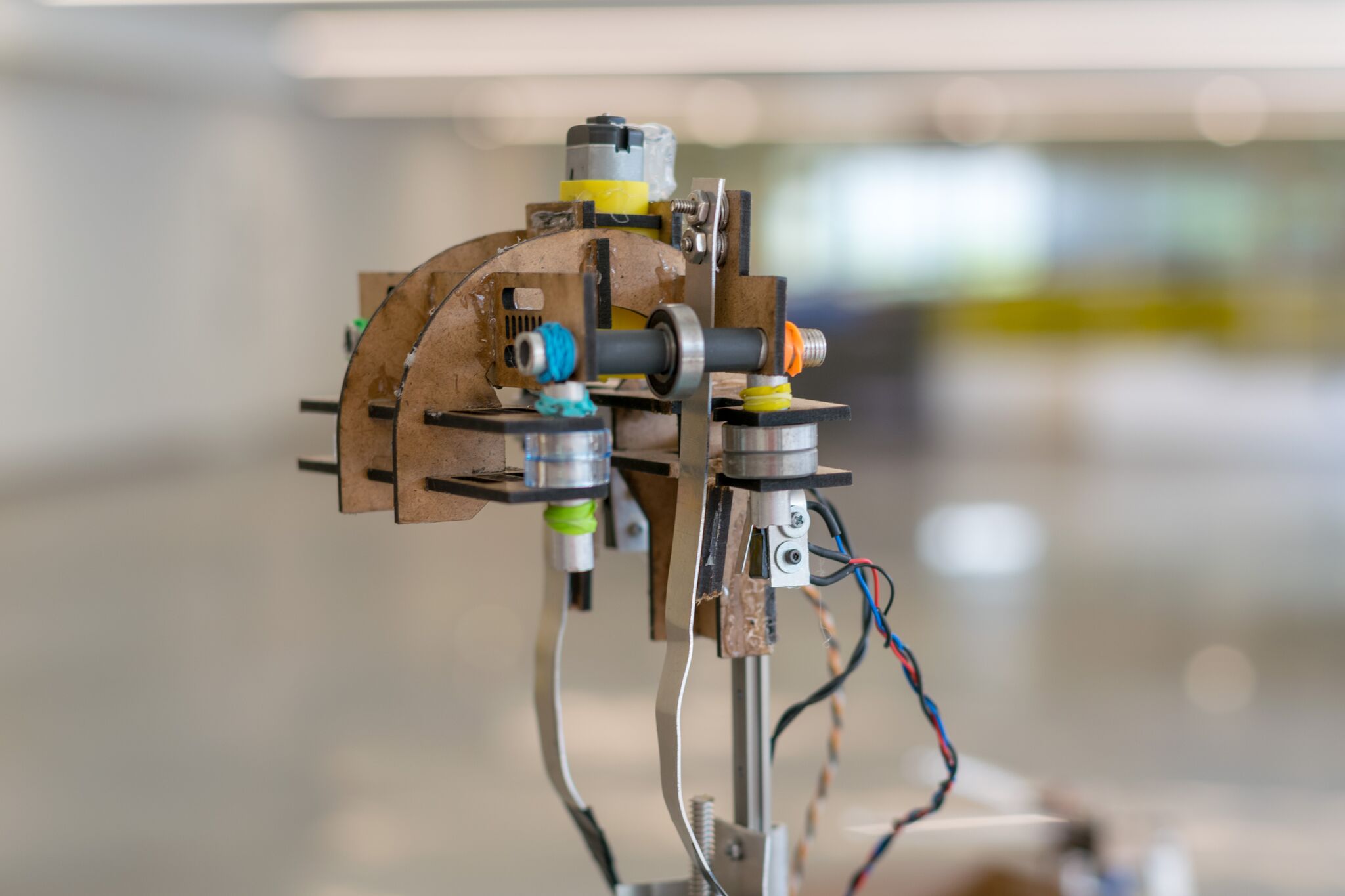
To cross the second gap, Robo-Fett lifts entirely off the ground and ziplines up to the third platform, much like a gondola. We made the ambitious decision to attempt the zipline because we did not like the variability introduced by having a second bridge (teams that chose this option ended up having a lot of trouble). Furthermore, if we could ascend the first zipline, we could also descend the second one after rescuing Chewie. It was not easy, but our zipline mechanism worked in the end, and we are proud to say we are the only team who managed to create a working zipline mechanism.
The zipline has two components -- the lift, and the hook. The lift is made up of a power screw attached to a slide, which heavily gears down a geared motor, allowing it to lift the entire weight of the robot. The hook is made up of bearings to help it remain balanced, and a motor with a small wheel to drive the robot up the zipline.