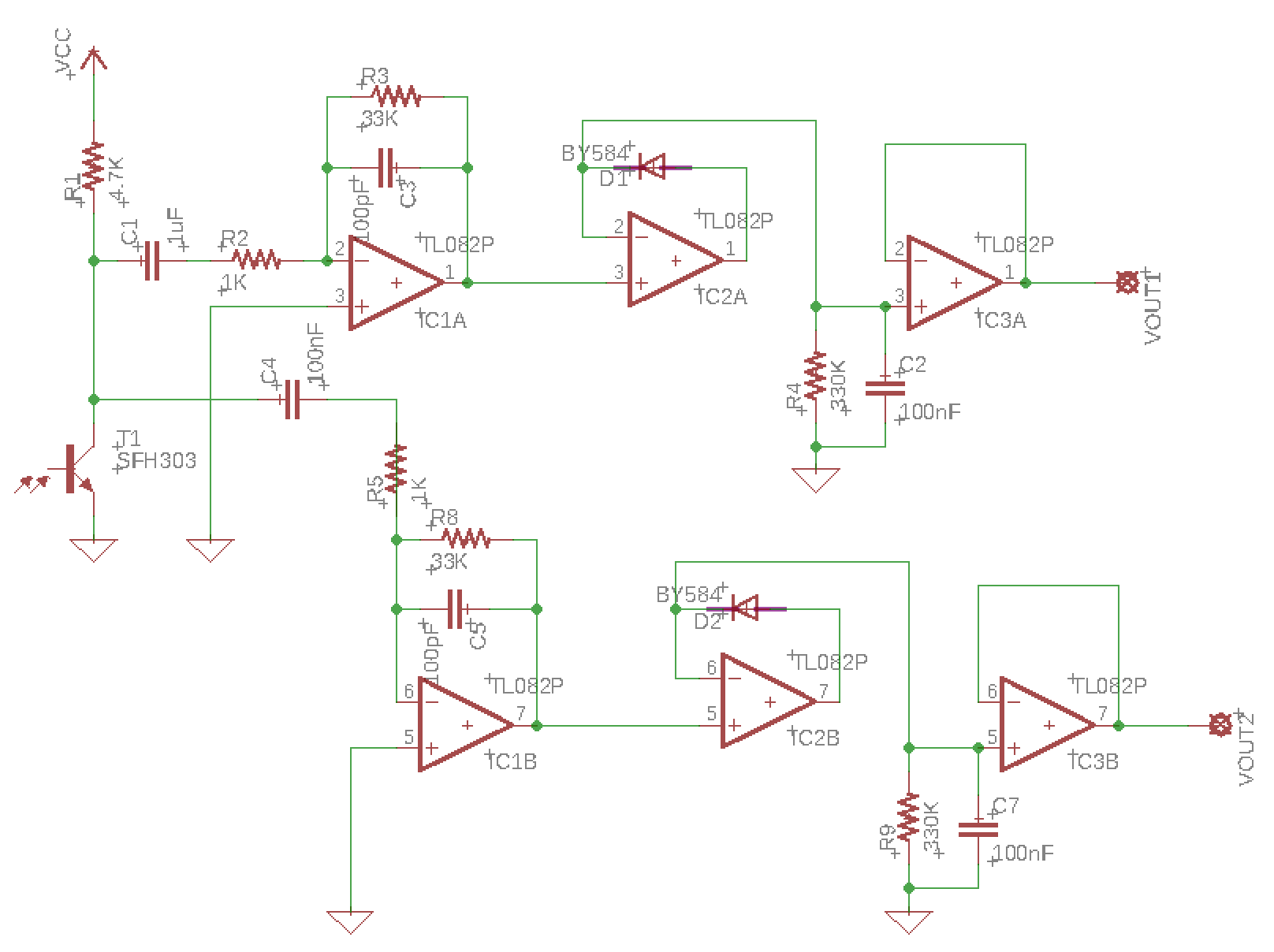
To get past the gate, Robo Fett had to wait until the IR emitter changed from 1kHz to 10kHz. We implemented an IR detection circuit using a series of op-amps that acted to filter the signal and then detect peaks in order to determine the frequency of the signal.
To follow the tape, we used QRDs (integrated IR emitter/detectors) at the front of Robo Fett. These sensors return analog values between 0 and 1024 depending on the reflectivity of the surface below. We started with two, but ended up deciding to use four since it allowed us to tape follow more smoothly, which led to more accuracy and speed.
To follow the bridge up to Chewbacca, we used QRDs on the side of Robo Fett to detect the edge of the bridge. To save on analog ports, we also converted these outputs to digital using a comparator circuit.
Detecting the Ewoks proved to be one of the most difficult tasks. Since they were made of a soft material, the ultrasonic sensor we tried at first did not consistently work. We then moved on to using QRDs, but they were not strong enough to differentiate between an Ewok nearby and a wall far away. We ended up designing our own IR emitter/detector circuit, using 4 IR emitting LEDs and an IR detector. This worked so well that other teams consulted us when designing their sensors.

We used four DC Motors in total: two in our drivetrain, one to drive the power screw to lift the robot, and one smaller motor to propel Robo Fett up the zipline. We powered the motors using a single 12-volt LiPo battery.
To control the motors, we ran the output from our microcontroller through an H-bridge powered by the 12 volt battery. This allowed us to increase our current to the motors past what our microcontroller outputted, while allowing us to run the motors both in forward and reverse.
On our drivetrain motors, we constructed encoder circuits using QRDs so we could keep track of the distance we were traveling. At first, we tried to debounce (minimise the error) in our encoder readings through software, by ignoring ticks that came in under a certain time interval. This was not quite sufficient and we ended up supplementing this with a debouncing RC circuit.
We used servos to dump the basket/drop the bridge, raise and lower the claws, and operate the claw tongs. We powered the servos using the same 12-volt LiPo as the DC Motors, but we regulated the voltage to 6 volts to ensure consistent performance.