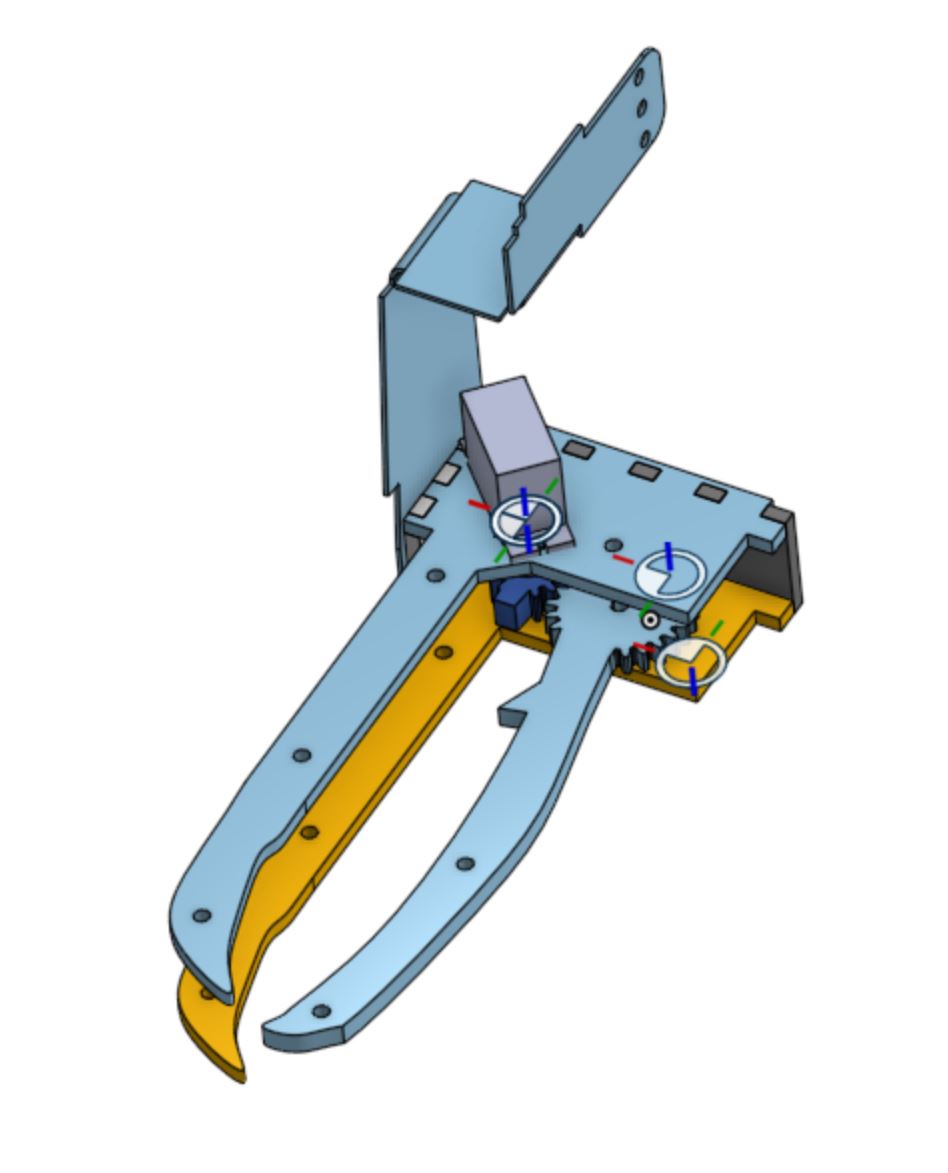
The first claw was designed to have two moving tongs. Upon detection of an Ewok, the claw would open, lower itself onto the Ewok, and pick it up. This was inconsistent at best; as the robot would have to stop exactly in the right place every time, otherwise the claw would hit the Ewok on the way down.
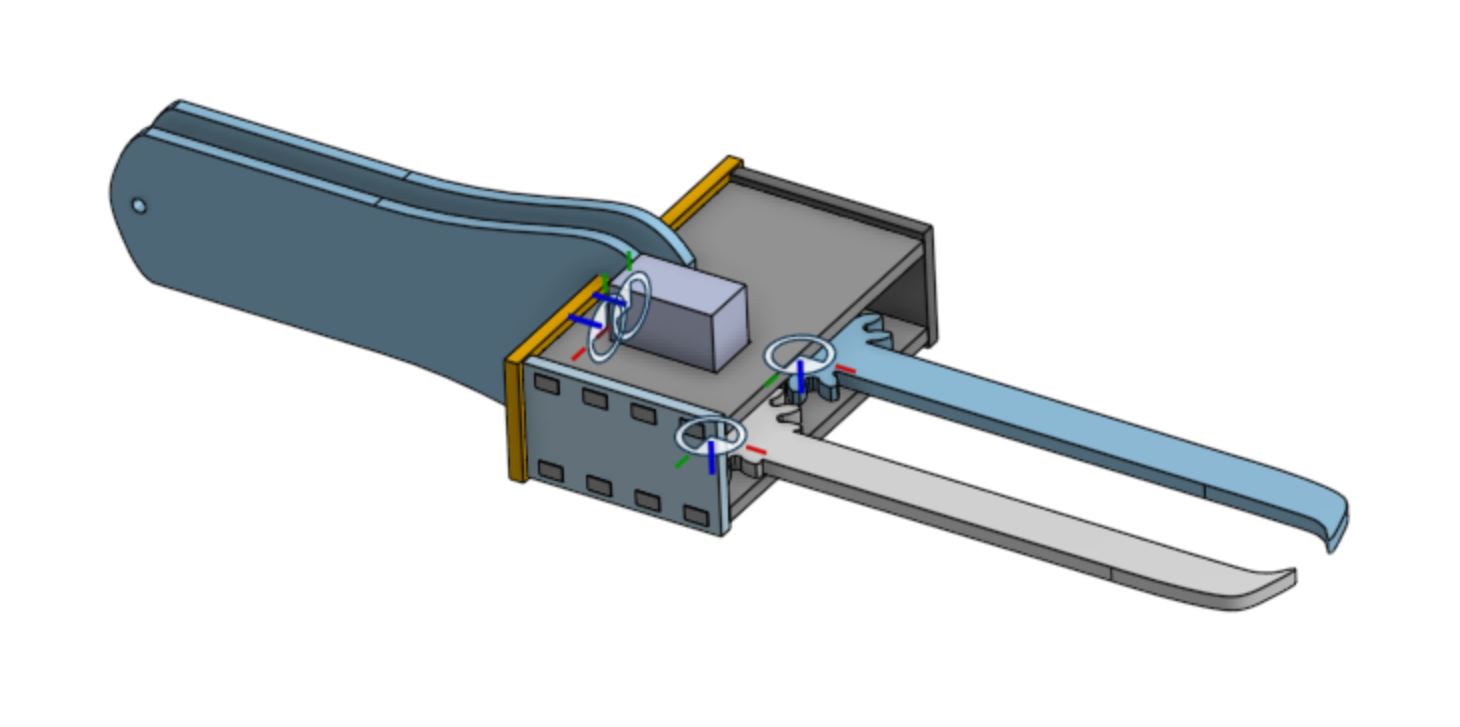
The final claw arm was made out of sheet aluminum, to reduce bulk. This also allowed us to bend the claw down 90 degrees, which made for better dumping. Most importantly, we changed the tongs so that only one of them moved out to 90 degrees -- this allowed the claw to be wide enough to not hit the Ewoks.
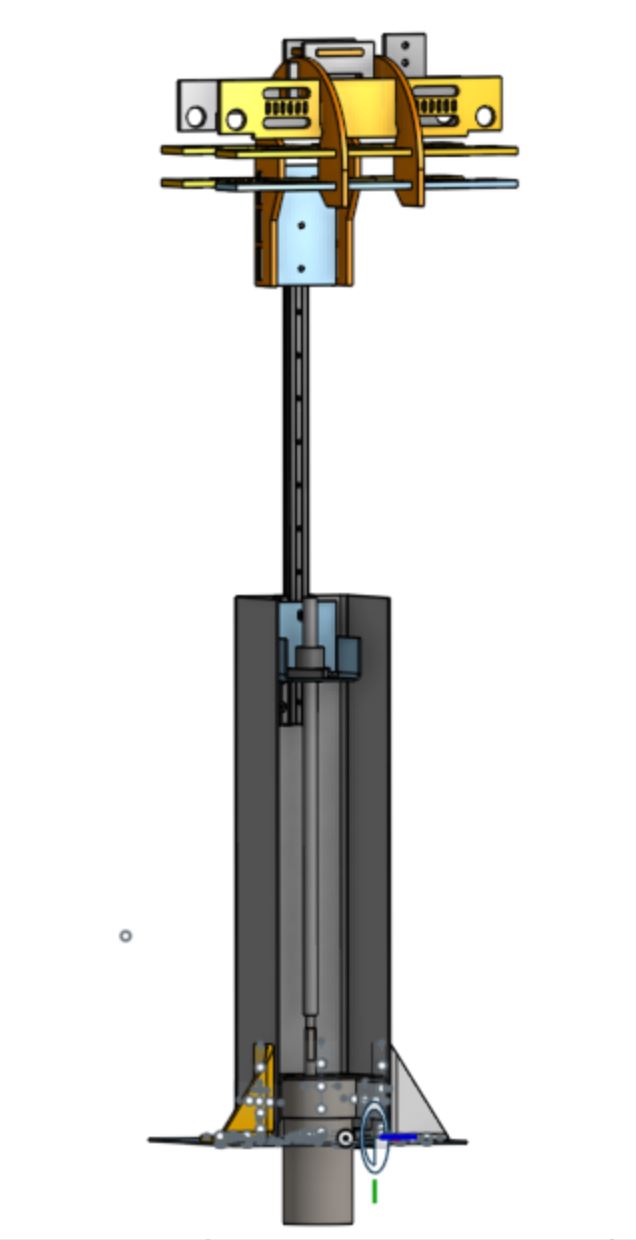
The hook at the top of the lift has bearings that help to balance as well as keep the hook firmly attached to the zipline, while allowing it to slide without resistance. To drive up the zipline, there is a motor at the top of the hook attached to a small wheel, which turns against the zipline.
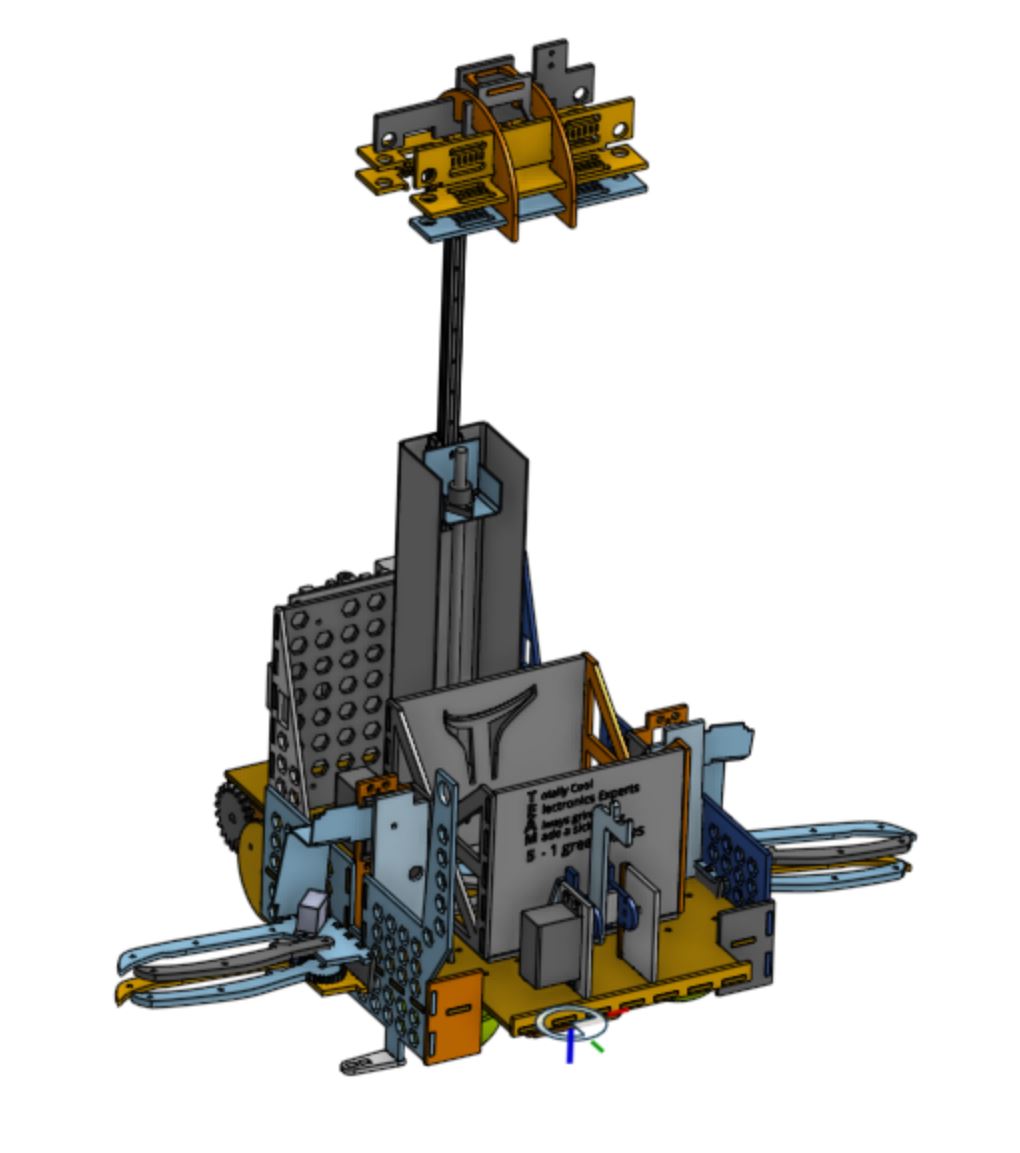
Robo Fett's lift is made up of a power screw attached to a slide. The high gear ratio from the power screw allows the single geared motor attached under the chassis to lift the entire robot. Limit switches at the top and bottom prevent the lift from going too far in either direction.
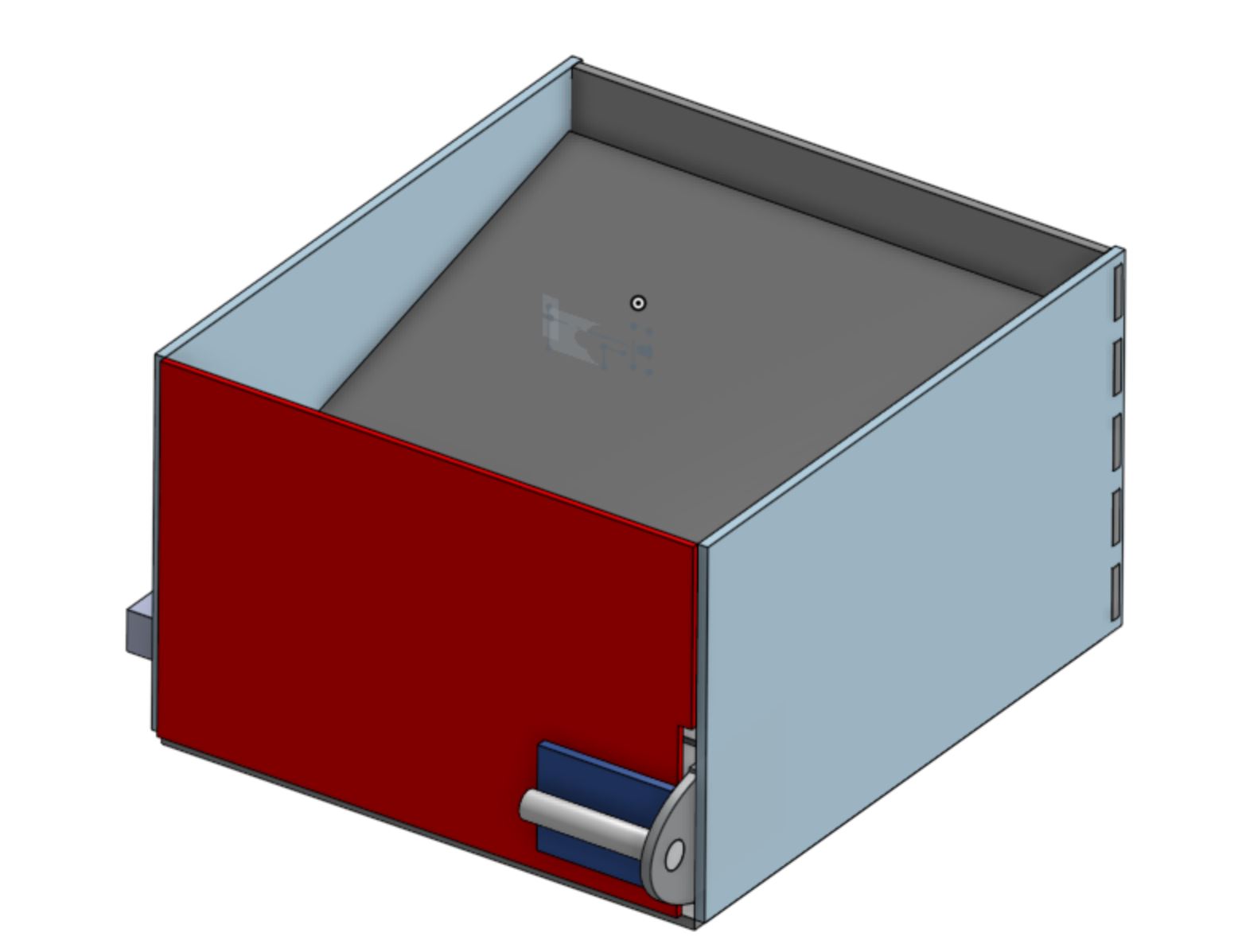
Our first basket was designed to be stationary, with a door that swung open to release the Ewoks. The inside of the basket was steep so the Ewoks would tumble out. This design took up a lot of space since half the volume was unusable; also, the Ewoks would not readily tumble out.
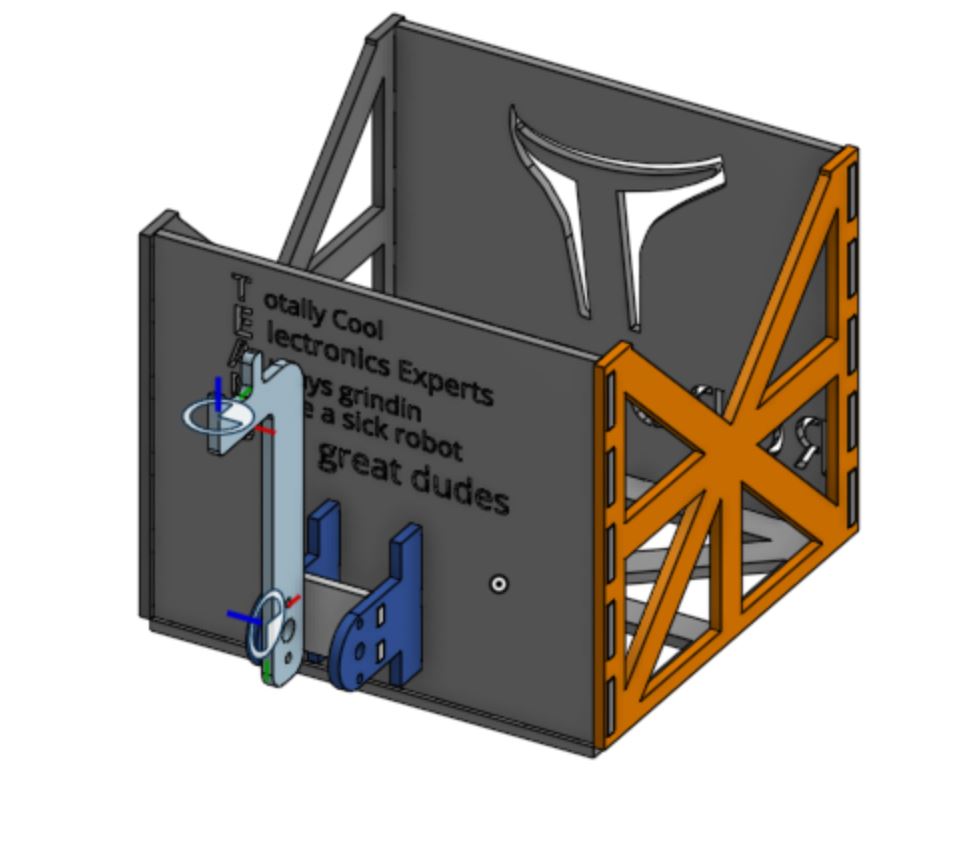
Our final basket is attached to a servo so that it can rotate 180 degrees, tossing the Ewoks to safety. It is more conservative of space, and consistently dumps the Ewoks. We also minimised the amount of servos we used by combining the basket rotating with the bridge lowering mechanism.
Our first full prototype was in use until time trials on July 27. We could pick up Ewoks, but not dump them, and our tape following was inconsistent due to a faulty sensor mount. Our zipline design had been finalised and tested on a separate test rig, and it was working well, but was not mounted to this prototype.
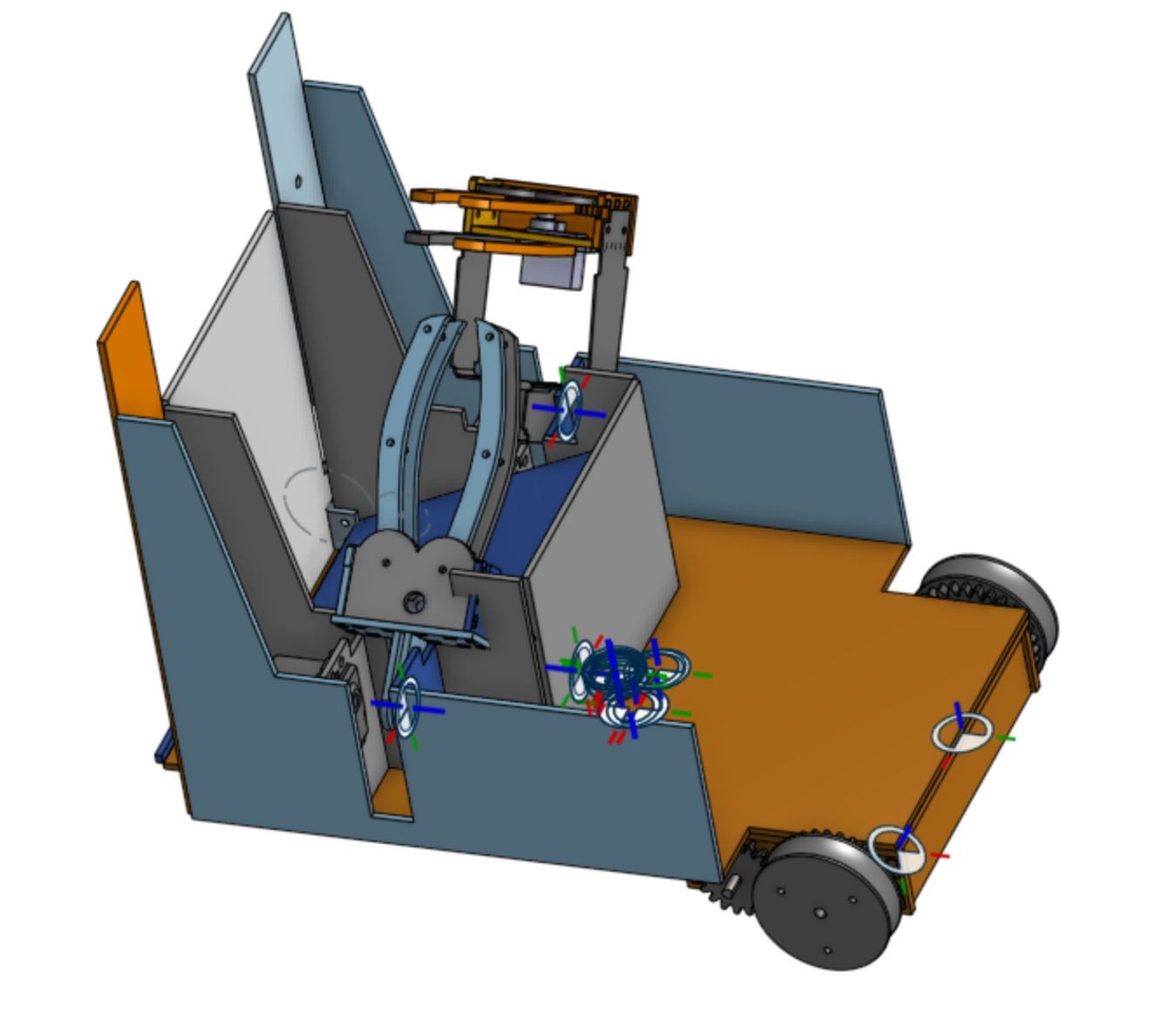
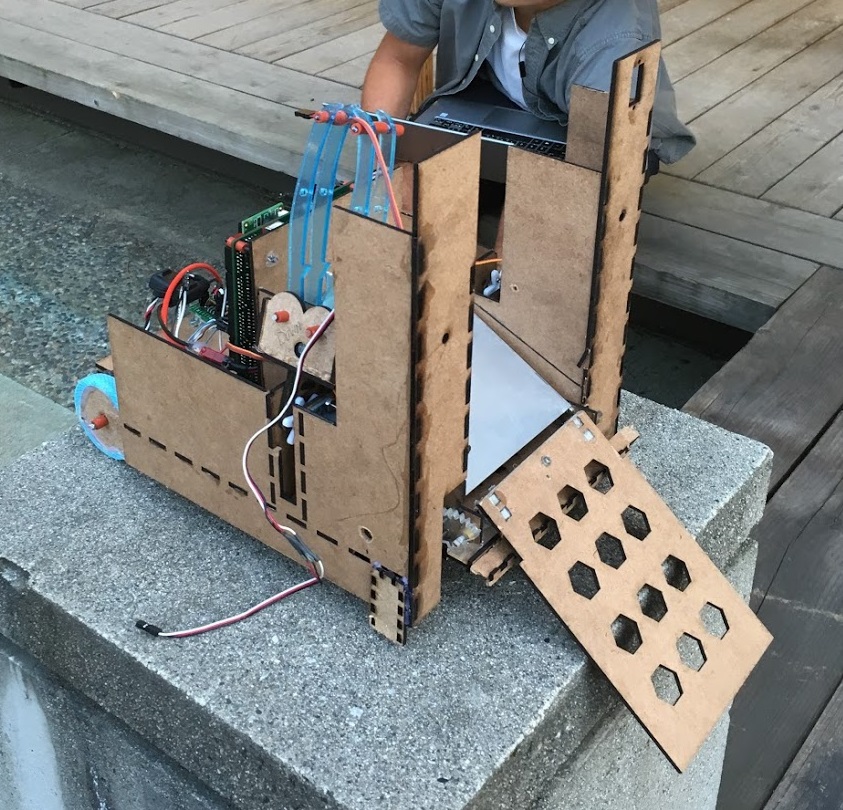
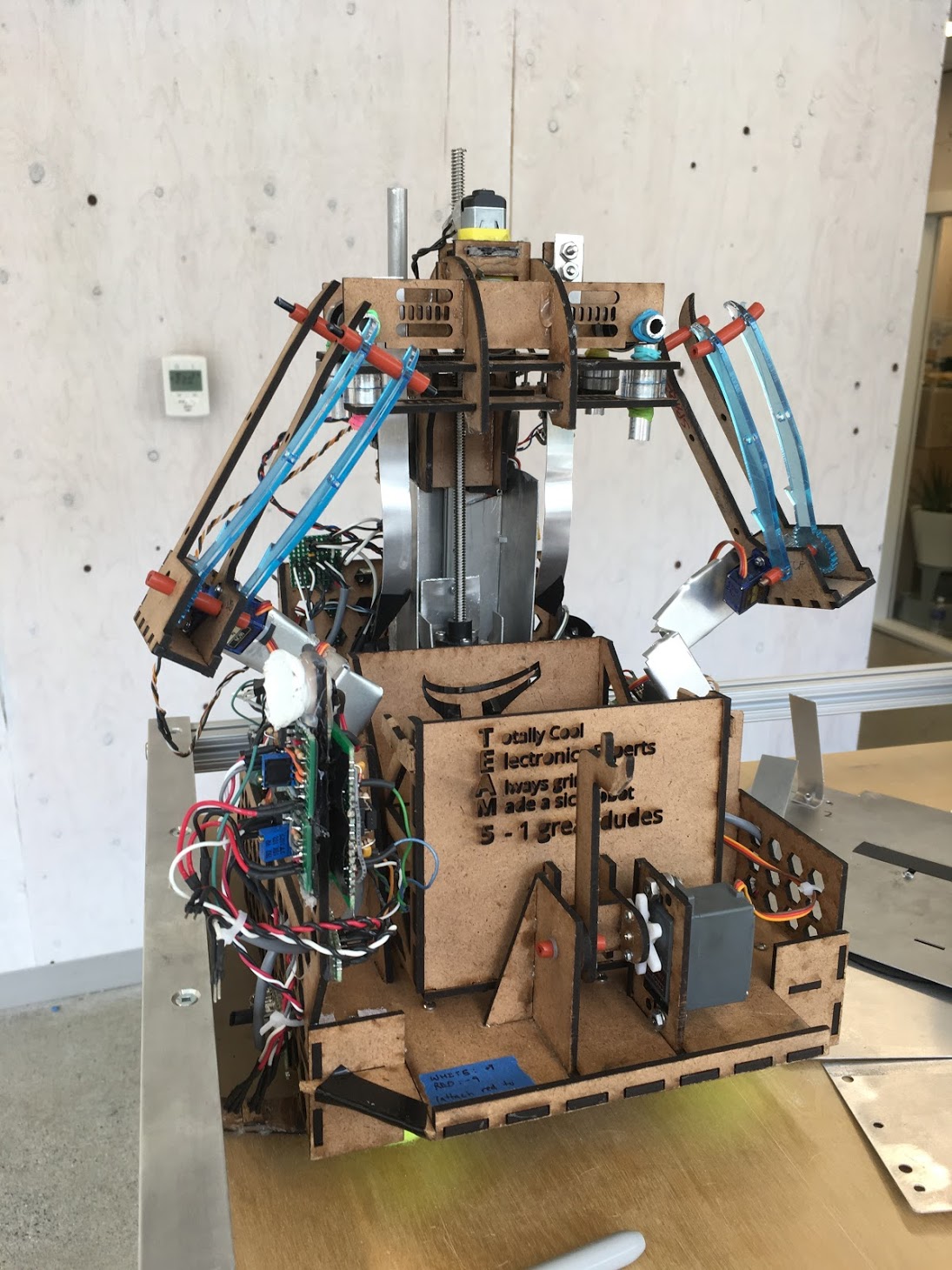
Our final design included all the final parts mentioned above, cleaner wiring, and better sensor mounts. With it, we were able to pick up and dump the first three Ewoks, travel up the zipline, pick up the last Ewok, and cross the bridge to Chewie.